AIアート時代におけるいちクリエイターの「お気持ち」論考
はじめに
この数週間のうちに,クリエイターの周辺環境は劇的に,かつ不可逆に変化してしまいました.
まず,文章から絵画を生成する絵画生成AIサービス「MidJourny」のベータ版が一般公開され,この技術に誰でもアクセスできるようになったこと.
次に,オープンソースの絵画生成AI「Stable Diffusion」のソースコードと学習済みデータが完全無料で公開されたこと.
そして,少数の画像群から絵柄を学習し,模倣した画像を大量生成できる絵画模倣AIサービス「mimic」がイラストクリエイター人口の多い日本で公開されたこと(こちらは8/30にβ版の公開が停止されました).
それ以前からも,線画にあるスタイルで自動彩色するAIがすでにCLIP STUDIOに実装されていたりと,人間の絵画技術を学習し模倣するAI技術が着々と生まれてきています.
このように,高度な絵画表現を学習し生成する技術が一般流通する時代となってしまった今,すべてのイラストクリエイターは否応なしに価値観のアップデートを迫られるようになりました.現在その功罪をめぐって様々な議論がSNSで繰り広げられています.
この記事では,上記の現状を分析したうえで,その所感と近未来をできるだけ具体的に言語化してみようと思います.特に,法律が追い付いていない現状で,クリエイターにとって絵画AIの何が許されないと感じるのかについて具体的に言語化することは,今後の建設的議論にとって非常に重要です.140文字に制限されることなく,「気持ち悪い」だけで終わらせることなく,じっくりと腰を据えてこの問題について考えたいと思います.
ちなみに,私はコンピュータサイエンスと心理学の研究者で,専門ではありませんが手習いにGAN (初期の画像生成AI) やGA(遺伝的アルゴリズム)を組んだことがある程度のAI技術があり,昔から時々趣味でイラストを描いています.要は,技術的なことがちょっとだけわかる木っ端絵師です.法律は専門外です.
また,私も二次創作をメインにたしなむ人間ですので,あまり偉そうなことを言える立場でないのは自覚していますが,この記事は一般論を語ったものとしてご容赦ください.なお,二次創作にも二次創作者に著作権が発生しますので,この記事でクリエイターといえば二次創作者も含むものとします.
Highlights
- クリエイターは絵画AIの登場により,①著作人格権のひとつである同一性保持権を絵柄によって維持できなくなることと,②絵柄という知的財産の価値が失われることを危惧している.
- 現状ではほとんど杞憂だが,今後AIが発展すれば上記の問題が一部発生しうる.
- ①の侵害は絵画AIを使う悪意ある人間の問題なので,今まで通り個別に対応していけばよい.
- ②については,絵柄によるセルフプロデュースを続けるなら絵画AIを前提とした新しいやり方が必要になる.
- もはや絵画AIは世界的潮流であり現実的に規制できないので,うまく付き合う方法を考えよう.
絵画生成AIが内部で何をやっているのか
ここでは細かい技術をかなりデフォルメします.機械学習分野に詳しい方はご容赦ください.
参考:
https://ja.stateofaiguides.com/20220412-dalle-2-image-generation/
Stable Diffusionで使われている技術「DALL-E2」を簡単に説明すると,文章と画像の概念レベルでの相互翻訳が可能なAIを学習する過程でクロスモーダルな概念空間を獲得し,更に概念から画像を再構成するAIを用いることで,文章から抽象的な概念へ,抽象的な概念から画像へと変換する技術です(ここでいう「クロスモーダル」とは,文章と画像という別種の情報源(モーダル)が相互に影響しあっていることを差しています).
クリエイターが最も気にする点は「こいつは私の絵を勝手にコピペ(コラ)する悪いAIなんじゃないか?」ということでしょうが,抽象化という段階を噛ませているため,中で学習データの部品をコラージュしているわけではないですし,学習データ内の画像そのもの(完全一致するもの)が生成される可能性は(厳密にゼロではないけど)天文学的に低く,実質上ゼロといっていいレベルです.ただし,学習に使われた絵から得られる抽象的概念が十分に特異的であった場合,学習データの絵によく似た絵が出てくることがあります(例えば,学習した絵に必ずついていたサインまで画風の一種として学習したり…).これはAIに描き方を細かく指定していけばそれなりの確率で出てくると思います.一言でいうと,「単なるコピペではなくAIなりに咀嚼して描いている」と考えてよいと思います.
さて,文章や画像から学習される概念は意味的な「演算」ができます.概念空間では例えば,「女性の画像」+「眼鏡をかけた男性の画像」ー「男性の画像」=「眼鏡をかけた女性の画像」といった演算が成立します.これは画風でも同じで,過去にStyle Transferという名前で一大注目を浴びました.mimicはそれをイラスト顔画像に特化して,高精細にやっているのだと予想します.
ちなみに,絵画生成AIの技術はここ数カ月で産まれたものではなく,数年前の段階から登場していました.今回Stable Diffusionが利用可能な形でソースコードが公開されたこともあり,絵画生成AIを使ったサービスは爆発的な速度で発展していくでしょう.
絵画生成AIに対する法的な見解
私は法律の専門家ではありませんが,以下のような議論を見かけました.
参考:
https://www.itmedia.co.jp/news/articles/2208/09/news162_3.html
https://wired.jp/article/openai-dalle-copyright-intellectual-property-art/
https://news.yahoo.co.jp/articles/63759292d84942f51e26aaee264edae3943d1c73
https://storialaw.jp/blog/3573
改正著作権法の概要資料
https://www.bunka.go.jp/seisaku/chosakuken/hokaisei/h30_hokaisei/pdf/r1406693_02.pdf
絵柄の著作権について
https://togetter.com/li/1936934
https://ameblo.jp/hibari-o/entry-12111208397.html
https://kigyobengo.com/media/useful/203.html
https://www.astermarksip.jp/character-protection.html
mimicガイドライン
https://radius5.notion.site/bb06c57fee9849548e4ab139788b1eff#ed5b5bf84244467e9bf338bd4497e83e
○ 第三者が特定のクリエイターを模倣するように学習可能にするのは明確な不利益を生じる可能性があるため,著作権法47条の5で示される「(AIによる創造物のために基本的には許諾なしで利用可能だが)ただし,著作権者の利益を不当に害する場合はこの限りでない.」に該当するのではないか?
- AIが生成した画像の著作権については,ユーザーが創作意図に寄与している場合はユーザーに著作権が生じる.
- OpenAIをはじめとするAI提供者は,生成画像についてはユーザーが商用利用可能としているのが一般的.
- mimicで生成したイラストはクリエイター(イラスト権利者)に帰属し,ユーザーは自身が描いた画像以外をアップロードすることを利用規約で禁じている.発覚した場合,アカウント停止と捜査機関への情報提供を示唆する内容がある.
- 作品には著作権が発生するものの,絵柄そのものやキャラクターそのものには著作権はない.
○ キャラクター自体の権利を保護するには商標登録が必要.
○ 絵柄の模倣による不利益は不正競争防止法による保護を受けられる余地があるが,権利を前提としたものではないため,ケースバイケースで法廷で争う必要がある.
- 元イラストの特徴がありふれた表現でなく,本質的特徴が類似する場合は著作権侵害に当たる.
○ AI生成物が既存著作物に「偶然」似てしまった場合は,侵害成立要件の「依然性」に該当する可能性が高い.
クリエイターは何を危惧しているのか
そもそも上述のように,絵柄自体には著作権はありませんので,本来は絵柄模倣AIは法的に問題ないはずです.しかし現実には,少なくないクリエイターから激しい反発が生まれました.一体なぜでしょうか?
これまで,クリエイターがひとつの絵柄を獲得するまでには並大抵ではない努力が必要でした.そして絵柄というのはおよそ人が真似しようとしてもなかなか真似できるものではなく,完璧に真似しようとしてもどうしても自身の個性がにじみ出てしまうものです.それ故に,我々には暗黙のうちに「絵柄の一致=クリエイターが同一」という図式が成り立っていました.(余談ですが,ジョジョパロのような絵柄の恩恵が大きいパロディもこの性質があるからこそギャグとして成立しています)
しかし,絵柄模倣AIのリリースと絵画生成AIの発展によって,苦労して育てた自分の絵柄が瞬時にコピーされ大量拡散される世界に不可逆に変質しまったのが現状です.このことは,現代のクリエイターに2つの本質的な不利益をもたらす可能性があります.
-
クリエイターが絵柄によって自己の表現をコントロールできなくなる.
クリエイターの多くは,自己の作品の内容を無断で改変されないことを望んでいます(同一性保持権).これまでは絵柄の模倣が難しかったため,「その作品が本当にAさんが発信したものである」という保証として,絵柄の一致性がクリエイター側にも見る側にも通用していました.しかし絵柄をごく短時間で高精度に模写できるようになった今,見る側は”それ”がクリエイターの発信物であるかAI作品なのかを判別することが極端に難しくなりました.これにより,クリエイターが本来望んでいない表現を「Aさんがこんな作品を作った」と第三者が誤認させられるようになります.特に,作家性の中で絵柄の比重が大きい二次創作者にとってはこの問題はよりクリティカルになります.
たとえば,「クリエイターのAさんが絶対描かないはずのNTRモノが間違いなくAさんの絵柄で流通している」という状況を想像してみましょう.実際にはAIの生成物であっても,絵柄が一致しているため,ほとんどの人は一見して「ついにAさんがNTRに屈した」と受け取ってしまいます.これはNTR絶対許さない派のAさんの脳が破壊されるだけでなく,絵柄と作風によって「私は今後もNTRモノは絶対に描きません」と暗黙に周知していたAさんのこれまでのセルフブランディングまでも毀損し,将来の売り上げやキャリアを失わせる行為に繋がりかねません.DeepFakeの構図とかなり似ていますね.
このように,AIによる高速・高精度の絵柄模倣は,クリエイター本人が望まない表現を絵柄という一種の証明書と共に流通させてしまう可能性があり,大衆が思う「自分(の作品)」をクリエイター自身がコントロールできなくなる危険性を孕んでいます.自分の絵柄が自分の知らないところで生まれる可能性が生じてしまったことについて,少なくないクリエイターが「気持ち悪い」と表現するのはこのような背景があります.
-
これまでの絵柄の発明価値が劇的に低下する.
絵柄とは,クリエイター各人の創意工夫の末に生まれる努力の結晶であり,一種の知的財産といえます.自然科学に基づく発明考案であれば,特許という形で発明者の創意工夫にかけた時間とひらめきの質に対して褒賞と対価が得られますが,絵柄にはそれがありません.ですので,一度よい絵柄が生まれれば大量のフォロワーが生まれます(たとえば「グラブル塗り」などが代表例でしょうか).しかしながら,絵柄の特徴をフォロワーが学習するまでにはそれなりの時間がかかることや,学習しきってもなお元の絵柄の個性が残ることがほとんどであることから,絵柄の普及までの実質的な独占的使用が実現されつつ,新しい絵柄の発明に繋げる重要な礎としてフォロワーに賞賛されるという,特許制度に似たエコシステムが構築されていました.
誰でも利用可能な絵柄模倣AIは,この既存のエコシステムを根本から破壊してしまう恐れがあります.新しい絵柄を苦労して発明しても,労することなく簡単に完璧にコピーされてしまい,簡単にコピーされるが故に絵柄を生み出したことについて賞賛もされない,なんてことになるかもしれません.むしろ,絵柄をコピーした側こそがオリジナルだと考えられて賞賛が集まってしまい,開発者の自分がパクリだと誹られる可能性すらあります.これでは,新しい絵柄を苦労して開発するモチベーションがありません.
もちろん,クリエイターもゼロから絵柄を発明するわけではありませんので,誰かの絵柄をどこかで模倣している点は絵画AIと同じです.しかしながら,ほとんどの創造的なクリエイターにとって模倣は自己表現のブラッシュアップのための咀嚼であり,絵柄の完璧なコピーを目的としていません.実際,絵柄を特定のクリエイターに寄せすぎると「Aの絵柄はBのパクリ!」という風に叩かれる現象があります(絵柄には著作権がないのに!).このことは,我々が法律以前の肌感覚として,絵柄やスタイルの同一性に一種の独占権のようなものを想定していることを如実に示しているのではないでしょうか.ここら辺は法哲学の専門家にぜひ議論して頂きたいところです.
クリエイターは絵画AIの不安にどう向き合うべきか
上記の不安は今のところ半分杞憂です.実際に触ってみると分かりますが,そもそも現状のMidJourney / Stable Diffusionは,自分の思った通りの絵を出すこと自体が難しいです.AIに食わせる文章を洗練させるAIが出てくるなどで今後より扱いやすくなったとしても,文章から画像を生成するタイプのAIであればこの傾向は一般に変わらないでしょう.なぜなら,一般に絵画を構成する概念の次元(自由度)は非常に高いからです.そのような高次元空間から文章によって意図した理想の画像を含む狭い部分空間を的確にピックアップするのは困難を極めます.この自由度はデータセットやニューラルネットワークの組み方によって変わるのですが,今後仮にそのようなことができるAIが現れたとしても,そのAIの汎用性は逆に非常に狭くなると思われます.ですので,自らが手を動かして描く必要性は今後も残っていくものと思われます.何より,描くことの楽しさや喜びまではAIにも奪えません.
半分は,実際に起こりうることでしょう.ただし前提として,悪いのはAIではなくそのAIを悪用する第三者だと私は考えています.
同一性保持権の侵害については,今までも雑コラやパロディ二次創作などの形で既に発生していた問題でもあります.絵柄模倣が誰でも使える技術になったことでその参入障壁は今後間違いなく下がるでしょうが,3Dスキャナや3Dプリンタのように,絵画生成AIを上手く扱う技術が新しい技術的障壁となるため,文字通り誰もがクリエイターの同一性保持権をいつでも侵害する未来にはならないと考えます.新技術を変に恐れず,問題が発生したら今まで通り個別に対応すればよいだけの話に思えます.むしろ,絵画AIの登場によって必ずしも絵柄の一致がクリエイター(著作者人格)の一致にならないことが周知されますので,将来問題が生じた際の周囲の理解は比較的早いのではないでしょうか.
また,絵を満足に描けない人が自由に絵柄を模倣できた場合に望むことは「こっそりと,あのキャラのあんなシチュの画像があの素敵な絵柄で欲しい!」だと思いますが,キャラとシチュと絵柄を正確に指定できる絵画生成AIは(今後現れるかもしれませんが)現状ありません.
(9/2修正:ここに私的複製に関する私見を述べましたが、思うところがあり削除しました)
一方で,知的財産としての絵柄の価値については少々深刻です.AIが絵柄を模倣できるということは,単にコピー品を作れるということに留まりません.それは絵柄の数値化ができたということであり,絵柄のリバースエンジニアリングが格段に容易になったことを意味します.私はこの問題については,もはや産業革命が起こったものとして,今までのように絵柄を秘伝的に守れない世界になったと諦めと共に受け入れるのが早いのではないかと考えています.むしろ,自分の絵柄のオリジナリティを商売上の武器にしたいならば,逆にAIを上手く活用した新しいセルフプロデュースの形を模索していくことが今後必要になるのではないかと考えられます.例えば,AIで分析した自分の絵柄のレシピを自ら公開して積極的に自分の絵柄フォロワーを増やしていく,AIで様々な流行の絵柄を分析し新しい魅力的な絵柄を次々と開発していく,などが考えられます.
これについては,絵柄と同じく著作権が認められない(が,絵柄と違って特許権は認められる)料理のレシピを例にとって考えましょう.まず,料理には著作権が認められません.従ってレシピを独占的に使用するには,特許権を取得してレシピを公開しながら時限的に独占するか,レシピを一切秘匿するかのどちらかになります.一見して材料の成分比率の分からない食品では基本的に後者が得です.しかし近年,人間の味覚を再現した味センサが開発されたため,食品開発の現場で特定の味を数値的に再現できるようになり,味のリバースエンジニアリングが可能になってしまいました.これで食品業界がどうなったかというと,各社がより良い味を作り出すためのレシピ改良にこの味センサを積極的に活用するようになったのです.絵画の問題が食品のケースに完全に当てはまるわけではありませんが,同様にクリエイターが絵画AIを積極的に活用して,自らの作品をよりブラッシュアップするような使い方ができるようになるとよいと思います.
おわりに
さて,物議を醸した絵柄模倣AIサービス「mimic」の利用規約を見てみると,(少なくとも建前上は)被害をできるだけ抑えるようにうまくできているように思えます.悪意ある第三者が拡散したとしても,その権利は模倣されたイラストの制作者に移ることになり,権利者削除が認められることになるからです(文面を読んだ個人の見解です).また,Twitter連携によって作者同一性を第三者にチェックさせる機能がついている点もうまいと感じました.これにより,元の作者だけでなくファンも不当な利用がないか監視しやすくなります.実際のところ,顔画像のみという制約もあり,mimicを低リスクで悪用するのは難しいのではないでしょうか.
しかしながら,規約を無視すれば悪意ある第三者が無断で他者のイラストをアップロードできてしまうことには変わりなく,元のクリエイターの同一性保持権が侵害される被害の発生自体は防げない仕組みになっていました.この指摘を受け,8/31現在ではβ版の公開が停止されています.
基本的に,このようなAIの学習や利用を規制するのは悪手です.仮にmimicを日本の法的根拠に基づいて潰そうとしても,技術がオープンになってしまった今,日本のクリエイターの論理が通じない海外で絵画AIが今後ますます発展するでしょう.例えば米国では,フェアユースの概念に基づいてインターネット上の画像は事実上無制限に利用できることになっている(おそらく今後も変わらない)ので,クリエイターが自身の著作物についてAIへの利用禁止を主張しても無視される可能性が高いです(botで大量の画像を収集する仕組みのため,技術的な意味でも個別の使用禁止声明に対応するのは不可能に近いです).個人的には,規約をしっかり作りこんでいる点で好印象なので,海外から無法なAIが展開される前にmimicのような日本のサービスがイラスト界隈でのデファクトスタンダードとなることを期待しています.
まとめると,今までの絵画AIがなかった世界にはどうやってももう戻れないのですから,新たな黒船が来航する前に,過度な危惧をせずに早いうちから絵画生成AIの技術とうまく付き合っていくのが得策です.既に,MidJourneyをアイディア出しやラフのために使い始めているクリエイターも複数出現しています.実際のところ,絵画生成AIを最もうまく使えるのは,元々イラスト制作の素養があるクリエイターなのではないでしょうか?私もいちクリエイターとして,この技術を上手く使えるようになりたいと思います.
複数のM5StackでESP-NOW双方向通信を試す
最近,お仕事でM5Stackを扱う機会がありました.私はこれまでマイコンといえばSTM32とArduino(とその互換機)を扱ったことがありますが,M5Stackを扱ってみて電子工作がどんどん便利になっていることを実感しています.以前の記事でDigisparkを扱った時もその小ささと扱いやすさに感動したものですが,M5Stackは本当に凄いです.
今回は,4個のM5StackをESP-NOWで無線接続し,マスター・スレーブの関係を起動後に指定できるようにします.
M5Stackとは

深圳のスタートアップ企業M5Stack社が発売する,オールインワンマイコンとでもいうべきArduino互換のマイコンです.個人的にRasberryPiを初めて知った時と同じくらい革命的です.
驚くべきは入出力系が一通り揃っていることで,Basicグレードですら,モニター,スイッチ入力,スピーカー,6軸モーションセンサ,SDカードが備わっており,更にバッテリーが標準搭載なのでスタンドアロンで動きます.Wifi/Bluetooth接続も可能なのでIoT開発にも使いやすいです.従って,基本的な動作確認とデバッグはM5Stack本体だけで完結できます.単純なprintfデバッグならシリアルモニタすら不要です.
拡張性も高く,様々なモジュールを積み上げるように接続できるようになっています.専用ユニバーサル基板によって,自分で独自のモジュールを開発することもできます.更に,上位機種ではLEGO互換の固定穴やGrove端子が用意されているものもあり,マインドストームとの連携も考えられています.
何より,基板むき出しじゃない点が非常にクールです.専用拡張モジュールを使う限りは,ハウジングを自分で用意する必要すらありません.
開発環境も,Arduino IDEが使えるほか,UIFlowというWebベースのビジュアルプログラミング環境が用意されています.後者については私は試していませんが,見た目はScratchのようですので学習用にも最適ではないでしょうか.
余談ですが,M5Stack社の社長は元々は企業の電気エンジニアで,組み込みシステム開発する際に毎回同じ入出力モジュールを組み立てるのが煩わしく感じたことから,元々必要なものがすべて備わっているマイコンがあれば売れると考えて独立したそうです.至れり尽くせりの出来栄えは現場を知っているからこそでしょうか.M5Stackは英語圏よりも日本での売れ行きが特に良いそうで,日本の組み込みエンジニアの層の厚さと嗅覚の鋭さを感じさせますね.怪しい中華デバイスも日本人なら漢字から何となく意味が分かるからなんだろうか…?
今回やりたいこと
1台のPCと大量のマイコンを無線シリアル接続したいのですが,Bluetoothで何個もCOMポートを開けたくありませんし,そもそもBluetoothは7台までしか接続できません*1.そこで,1個のマイコンをハブ(マスター)にして,その下に複数台のマイコン(スレーブ)を接続する方式にしようとしています.
ただ,マスター用・スレーブ用のプログラムをわざわざ別々に用意するのは億劫ですよね?私は怠惰で粗雑なので,同じ見た目のM5Stackのどれがマスターでどれがスレーブかなどと管理できる気がしませんし,したくありません.*2同じプログラムを全てのマイコンに書き込むようにして,どれがマスターでどれがスレーブかなんて後で自由に決めたいのです.どのM5StackにもPCとの無線通信手段があるのに,ハブ用に1個余計にマイコンを使うのも馬鹿らしいですし.
幸いにもM5StackにはESP32マイコンが使われていますので,この用途に最適なESP-NOWという通信方式が使えます.*3これはBluetoothとは別の通信規格なのでPC-マスター間の通信に干渉しません.また,双方向通信が可能で,本質的にマスターとスレーブを区別しない通信方式ですので,誰でもマスターになれます.*4
ということで,今回は起動後に一定の手順を踏んでマスター・スレーブを動的に決定するシステムを試作しました.
構成
M5Stack FIRE ×4台
なぜFIREにしたのか?というと,バッテリー拡張モジュールが標準装備なので長時間動作が期待できるからです.その代わり,GPIOへのアクセスが多少悪くなってしまいます.

結果
ソースはGitHubを参照.
動画にはなっていませんが,PCとBluetooth接続もできています.やったね!
ソースコードのフロー
本プログラムは以下のように動作します.
-
電源投入後,ESP-NOWを初期化する.
-
初期設定のため,ブロードキャスト用のPeer情報を登録し,初期設定用のコールバック関数を登録する.
-
初期設定モードに入る.この時点で,どれがマスターでどれがスレーブかは決まっていない.
-
ボタンをクリックした瞬間に,誰もマスターになっていない場合は,自分がマスターであるとすべてのデバイスに宣言(ブロードキャスト)する.その際,自分のMACアドレスをマスターのMACアドレスとして記録する.
-
マスター宣言を受信したら,送信者のMACアドレスをマスターとして記録する.自分はスレーブIDの確定していないスレーブであると認識し,IDカウンターを0とする.
-
ボタンをクリックした瞬間に,誰かがマスターになっていて,自分のスレーブIDが確定していない場合は,自分がスレーブであると宣言する.その際,スレーブIDをIDカウンターの値=nとし,n番目のスレーブとして自分のMACアドレスを記録する.その後,IDカウンターを進める.
-
スレーブ宣言を受信したら,送信者のMACアドレスをn(=スレーブID)番目のスレーブとして記録し,IDカウンターを進める.
-
以上の手続きを進め,IDカウンターが既定のスレーブ数に達した場合,初期設定モードを抜ける.
-
-
初期設定用のコールバック関数登録を解除し,設定完了後のコールバック関数を再登録する.
-
自身がマスターの場合,認識したスレーブのMACアドレスを含むPeer情報を登録する.逆に自分がスレーブの場合,認識したマスターのMACアドレスを含むPeer情報を登録する.
- Bluetoothシリアルポートを開ける.
-
以上で初期設定が完了するので,setup()を抜け,loop()に入る.
解説
※番号は上のフローと対応しています.
- ESP-NOWは内部的にWiFiの機能を借用しています.WiFiモジュールを起動し,disconnectした後にesp_now_init()のコマンドを入れることで,ESP-NOW用に初期化することができます.
- ESP-NOWでは,FF:FF:FF:FF:FF:FFに送信することですべてのESP-NOW通信中のデバイスに送信することができます.初期設定では全員が全員に自分の情報を教えあう必要があるため,ブロードキャスト用にPeer情報を登録しています.
- 全体としての動作は,最初にボタンをクリックしたM5Stackがマスターになり,ボタンを押した順にスレーブ1,スレーブ2,…と決定していくことになります(動画参照).初期設定ループを進めると,マスターのMACアドレスと各IDのスレーブのMACアドレスを全てのデバイスが(自分のMACアドレスも含めて)知っている状態になります.
- コールバック関数を付け替えることで,初期設定時の通信挙動と設定完了後の通信挙動を変えることができます.
- マスターもスレーブも,MACアドレス以外は設定を共通にしています.Peer設定は色々な設定項目があるようですが,今のところよく分かっていません.(「現在のチャンネル」とは…?)
- 自分のMACアドレス下2桁を使って固有のデバイス名を作成しています.ペアリング完了後はPC側のCOMポートが開きっぱなしになるので,別の機体をマスターにしたい場合はペアリングの解除をしてから初期設定するといいと思います.
- ここでは自分がマスターかスレーブかによらず,特定IDのスレーブに送信を試みる,という動作をさせています.自分がスレーブであればマスターの分しかPeer設定をしていないので,確実に送信失敗します.そのため,スレーブのボタンを押しても誰にも送信されない動作が実現できている,というわけです.本当は自分がマスターの時に限ってボタン読み込みするような挙動の方が望ましいと思います.
その他
- MyUtility.hには,主にモニター上部に電池残量や自分の属性を表示させるための機能が含まれています.今回はこの解説は省きますが,この記事が参考になると思います.
- 2021/10/21時点ではこのプログラムには致命的な欠陥があり,稀に意図せず落ちる場合があります.また,2個以上のM5Stackのボタンを同時押ししても落ちます.
- ブログへのアップ用にMACアドレスの上位5桁をマスクする機能を搭載しています.
*1:Bluetooth4.0から用意された Bluetooth Low Energy (BLE) 規格なら接続台数に規格上の制約はありません.M5StackもBLEを使えますが,BLEのライブラリはちょっと難しかったので今回はパスしました.何より,PCにCOMポートが大量に開く状況は避けられません.
*2:ラベルシールを貼るという管理手段もありますが,見た目のスマートさを劇的に低下させます.そのうえ,「やっぱりこっちのM5をマスターにしたい」「スレーブ①をスレーブ②に変えたい」となった時に,ラベルの貼り換え&プログラムの書き換えという虚無しかない手間が発生します.
*3:ESP-NOWはIEEE802.11規格をベースに独自拡張された通信方式です.WiFiと共通の機能を一部使うことになるため,ESP-NOW通信中にWiFiを使うときには注意が必要です.こちらの記事が詳しいです.
*4:本来,ESP-NOWでは送信側をコントローラ,受信側をスレーブと呼びます.今回はマルチスレーブ環境ですが,センサ群が一つのハブに情報を集積させる,IoTによくある場合はマルチコントローラ環境ということになります.このとき,マスター/スレーブ構成という文脈での「マスター」が,ESP-NOWの文脈では「スレーブ」と呼ばれることになります.この通り非常にややこしいので,本文ではマスター/スレーブ構成の文脈での呼称に統一しています.
TensorFlow初心者でもGANを学習できた
今回は流行りのネタ,DeepなLearningをしてみます.とは言っても公式チュートリアルをなぞるだけでは恐らくその後何も作れないので,ちょっとは頭で考えながらコードを書いていきます.
この記事は,TensorFlowのチュートリアル通りにMNISTデータを学習できたものの,それが何をやっているか,或いはチュートリアルの次に進もうとしているが,自分でモデルを作成するためにどういう方針でコードを書いていくべきなのかが分からない読者を対象にしています.そう,私のことです.
(20212021追記:この記事だけ異常な重さを誇っていたのが以前から気になってはいましたが,原因が数式表示にあると気づいたので,一旦文字列のまま載せることにしました.重くてイライラさせてしまいすみませんでした.)
TensorFlowチュートリアルの次にやるべきことは
私の場合,それはGANを自分の手で実装することでした.GANはモデルの概念は分かりやすいのでやるべきことは明確です.しかしCNNよりは複雑なので自ら実装するとなるとちゃんとTensorFlowを知らなくてはできないですし,学習結果が視覚的に分かりやすくモチベーションが高く保てるため,学習教材として最適だと考えました.
GANの実装
実装に際し,以下のgithubを特に実装の参考にしました.今回の実装はこれのほぼ写経です.
https://github.com/yihui-he/GAN-MNIST/tree/master/mnisthttps://www.tensorflow.org/tutorials/layers
また,理論や実装の考えなどは下記リンクを参考にしました.コード例がTensorFlowではなくKerasですが,それゆえに本質的な部分を理解するのに最適です.
GAN(DCGAN)とは
GANとは,「近年のDeep Learning研究の中で最もCoooooolなアイディア」とも評価されているDeep Neural Networkで,画像生成によく用いられます.以下,概念を簡単におさらいします.
GANは,Generator(以下G)とDiscriminator(以下D)という2つのネットワークから構成されます.Gはベクトルから画像を生成するネットワークで,Dは画像を入力するとそれがG由来(偽物)かデータセット由来(本物)かを判定するネットワークです.Gは出力画像を入力したDの出力がG由来と判定されないように,Dは逆にG由来の画像を正しくG由来だと判定できるように,相互に学習を進めていきます.勿論,学習の初期はGもノイズみたいな画像しか出さず,Dもガバガバな判定しか出しません.しかし学習が進むにつれてGもDも徐々に高度になっていき,最終的にはGからはデータセットと区別のつかない画像が出力されるようになる,という仕組みです.より詳しい説明は別のサイトでいっぱい紹介されていると思うので,そちらを参照してください.
「うん,アイディアは良く分かった.確かに上手くいくんだろう.でもこれどうやって実装すんの?俺にできる気がしない...」
というのが,チュートリアルを終えたばかりの人間の正直な感想でしょう.なので具体的に見てみます.
MNISTのためのGANモデル
MNISTは0~9の手書き数字が書かれた28x28のグレースケール画像ですので,Generatorの出力とDiscriminatorの入力は28x28x1次元の3階テンソルである必要があります.このGANの目的は,手書き数字っぽい画像を生成できるようにすることです.
Generator
乱数入力ベクトルから「手書き数字っぽい画像」を出力するモデルです.
100次元ベクトル -> [全結合] -> [バッチ正則化] -> [ReLU活性化] -> 1024次元ベクトル
1024次元ベクトル -> [全結合] -> [バッチ正則化] -> [ReLU活性化] -> [7x7画像化] -> 7x7x128画像
7x7x128画像 -> [5x5転置畳み込み, 2x2ストライド] -> [バッチ正則化] -> [ReLU活性化] -> 14x14x64画像
14x14x64画像 -> [5x5転置畳み込み,2x2ストライド] -> [バッチ正則化] -> [sigmoid活性化] -> 28x28x1画像
Generatorの入力ベクトルの次元は別に100次元である必要はないと思いますが,2層目,3層目,4層目で2x2のアップサンプリングがなされていくため,出力が28x28x1であれば自然と 7x7 -> 14x14 -> 28x28 と決まります.ここで2次元転置畳み込みとは,CNNにおける2次元畳み込みの逆操作に相当し,ある意味「逆畳み込み」のようなものですが,本質的には逆畳み込み(deconvolution)ではないらしいです.2次元転置畳み込みにおける2x2ストライドは,2x2 Up-Samplingに相当します.
この部分の定義に相当するコードは以下の通り.計算グラフを作成する段階の考え方はチュートリアルと何ら変わりません.自分で構築していくモデルなので,計算グラフが正しくつながっているか(結合係数の次元数の設定が適切か)は誰も保証しません.ここは特に注意する必要があります.
※後でGとDをまとめたDCGANクラスとして実装するので,ここで提示するコードは理解のための疑似コードとして読んでください(最後にソースコードをまとめて載せます).
#不定の次元数の定義 dim_z=100, dim_W1=1024, dim_W2=128, dim_W3=64, dim_ch=1, # TensorFlow内学習係数の定義 ## Generator self.g_W1 = tf.Variable(tf.random_normal([dim_z, dim_W1], stddev=0.02), name="g_W1") self.g_b1 = tf.Variable(tf.random_normal([dim_W1], stddev=0.02), name="g_b1") self.g_W2 = tf.Variable(tf.random_normal([dim_W1, dim_W2*7*7], stddev=0.02), name="g_W2") self.g_b2 = tf.Variable(tf.random_normal([dim_W2*7*7], stddev=0.02), name="g_b2") self.g_W3 = tf.Variable(tf.random_normal([5, 5, dim_W3, dim_W2], stddev=0.02), name="g_W3") self.g_b3 = tf.Variable(tf.random_normal([dim_W3], stddev=0.02), name="g_b3") self.g_W4 = tf.Variable(tf.random_normal([5, 5, dim_ch, dim_W3], stddev=0.02), name="g_W4") self.g_b4 = tf.Variable(tf.random_normal([dim_ch], stddev=0.02), name="g_b4")
# Generaterの計算グラフ def generate(self, Z): # 1層目 fc1 = tf.matmul(Z, self.g_W1) + self.g_b1 bm1, bv1 = tf.nn.moments(fc1, axes=[0]) # バッチ平均,分散 bn1 = tf.nn.batch_normalization(fc1, bm1, bv1, None, None, 1e-5) relu1 = tf.nn.relu(bn1) # 2層目 fc2 = tf.matmul(relu1, self.g_W2) + self.g_b2 bm2, bv2 = tf.nn.moments(fc2, axes=[0]) bn2 = tf.nn.batch_normalization(fc2, bm2, bv2, None, None, 1e-5) relu2 = tf.nn.relu(bn2) # [batch, dim_W2*7*7] -> [batch, 7, 7, dim_W2] y2 = tf.reshape(relu2, [self.batch_size, 7,7,self.dim_W2]) # 3層目 conv_t1 = tf.nn.conv2d_transpose(y2, self.g_W3, strides=[1,2,2,1], output_shape=[self.batch_size, 14,14,self.dim_W3]) + self.g_b3 bm3,bv3 = tf.nn.moments(conv_t1, axes=[0, 1, 2]) bn3 = tf.nn.batch_normalization(conv_t1, bm3, bv3, None, None, 1e-5) relu3 = tf.nn.relu(bn3) # 4層目 conv_t2 = tf.nn.conv2d_transpose(relu3, self.g_W4, strides=[1,2,2,1], output_shape=[self.batch_size, 28, 28, self.dim_ch]) + self.g_b4 img = tf.nn.sigmoid(conv_t2) return img
Discriminator
Generatorの出力画像とデータセット画像とを見分けるように学習するモデルです.
28x28x1画像 -> [5x5畳み込み,2x2ストライド] -> [leaky ReLU活性化] -> 14x14x64画像
14x14x64画像 -> [5x5畳み込み,2x2ストライド] -> [leaky ReLU活性化] -> 7x7x128画像
7x7x128画像 -> [ベクトル化] -> [全結合, dropoutあり] -> [leaky ReLU活性化] -> [dropout] -> 256次元ベクトル
256次元ベクトル -> [全結合] -> [sigmoid活性化] -> 1次元ベクトル(判定確率)
こちらは 画像入力→ベクトル出力 という,TensorFlowチュートリアルでも組んだ覚えのあるモデルなので,そこまで理解に苦しむことはないでしょう.違いは出力層が1次元ベクトル(=スカラー量)であることだけです.出力層が1の時はデータセット,0の時はGeneratorの出力と判定します.層が深いDNNの場合,全結合層の代わりにglobal average poolingを使うとよいとされています.ただしこれは収束が遅くなるため,今回のように浅い場合は全結合のままで構わないそうです.この部分に該当するコードは次の通り.
#不定の次元数の定義 dim_z=100, dim_W1=1024, dim_W2=128, dim_W3=64, dim_ch=1, # TensorFlow内学習係数の定義 ## Discriminator self.d_W1 = tf.Variable(tf.random_normal([5,5,dim_ch,dim_W3], stddev=0.02), name="d_W1") self.d_b1 = tf.Variable(tf.random_normal([dim_W3], stddev=0.02), name="d_b1") self.d_W2 = tf.Variable(tf.random_normal([5,5,dim_W3,dim_W2], stddev=0.02), name="d_W2") self.d_b2 = tf.Variable(tf.random_normal([dim_W2], stddev=0.02), name="d_b2") self.d_W3 = tf.Variable(tf.random_normal([dim_W2*7*7,dim_W1], stddev=0.02), name="d_W3") self.d_b3 = tf.Variable(tf.random_normal([dim_W1], stddev=0.02), name="d_b3") self.d_W4 = tf.Variable(tf.random_normal([dim_W1, 1], stddev=0.02), name="d_W4") self.d_b4 = tf.Variable(tf.random_normal([1], stddev=0.02), name="d_b4")
# Discriminaterの計算グラフ def discriminate(self, img): # 1層目 conv1 = tf.nn.conv2d(img, self.d_W1, strides=[1,2,2,1], padding="SAME") + self.d_b1 y1 = leaky_relu(conv1) # 2層目 conv2 = tf.nn.conv2d(y1, self.d_W2, strides=[1,2,2,1], padding="SAME") + self.d_b2 y2 = leaky_relu(conv2) # 3層目 vec, _ = tensor_to_vector(y2) fc1 = tf.matmul(vec, self.d_W3) + self.d_b3 y3 = leaky_relu(fc1) # 4層目 fc2 = tf.matmul(y3, self.d_W4) + self.d_b4 y4 = tf.nn.sigmoid(fc2) return y4
コスト関数
判定確率Dは0から1の値なので,対数を取ると (-\infty, 0) の範囲をとります.これを利用して,確率の対数の負値を最小化することで確率を1に近づけます.
Gに入力される乱数ベクトルを z とすると, D(G(z)) はGの出力がDによってデータセットの一部だと判定される確率です.Dには間違えてほしいので, D(G(z))=1 が望ましいです.従って,Gのコスト関数は次の式で表せます.
J_G = {1 \over batch}\sum_{batch} {-log(D(G(z)))}
一方で,Dの目的はGの出力とデータセットxを正しく見分ける事です.つまり,D(G(z)) = 0 でかつ D(x) = 1 であることが望ましいです.このことをコスト関数を使って表すと次のようになります.
J_D = {1 \over batch}\sum_{batch} {-log(1-D(G(z))) - log(D(x)) }
以上をまとめた計算グラフのソースコードは次のようになります.
# プレースホルダーの用意 Z = tf.placeholder(tf.float32, [self.batch_size, self.dim_z]) # Generatorへの入力 # 画像の用意 img_real = tf.placeholder(tf.float32, [self.batch_size]+self.image_shape) # Discriminatorへの入力 img_gen = self.generate(Z) # 出力 raw_real = self.discriminate(img_real) raw_gen = self.discriminate(img_gen) # 確率 p_real = tf.nn.sigmoid(raw_real) p_gen = tf.nn.sigmoid(raw_gen) # コスト関数の定義 discrim_cost = tf.reduce_mean( -tf.reduce_sum(tf.log(p_real) + \ tf.log(tf.ones(self.batch_size, tf.float32) - p_gen), axis=1)) gen_cost = tf.reduce_mean(-tf.reduce_sum(tf.log(p_gen), axis=1))
Dのコスト関数において,1の代わりにtf.ones(batch_size, tf.float32)を使用します.これは,コスト関数には1個の画像だけでなくまとまった量のバッチが流れてくるため,そのバッチサイズ分の1を用意する必要があるからです.
また,チュートリアルで組んだCNNとは異なり,G用とD用でコスト関数が2個になっています.ただしどちらのコスト関数でも互いのモデルを使用するため,Gを学習するときとDを学習するときでそれぞれのパラメータは共通でなければなりません.もしGとDを別々のクラスとして実装する場合は,この点に注意しましょう(うっかりD学習時とG学習時で別のインスタンスにしてしまうと,メンバ変数がそれぞれの学習で共有されず学習が進まないなんて事態も考えられます).
学習の戦略
GとDの目的関数は相反する内容であるため,すべての変数をどちらの最適化でも考慮してしまうと学習が全く進みません.従って,Gの学習プロセスではGに関わる変数だけ,逆にDの学習プロセスではDの変数だけを最適化計算させなくてはなりません.さて,実は上のコードで,tf.Variable()に学習係数を登録する際にひっそりと名前(name=)を個別につけていました.
# Generator self.g_W2 = tf.Variable(tf.random_normal([dim_W1, dim_W2*7*7], stddev=0.02), name="g_W2") self.g_b2 = tf.Variable(tf.random_normal([dim_W2*7*7], stddev=0.02), name="g_b2") # Discriminator self.d_W2 = tf.Variable(tf.random_normal([5,5,dim_W3,dim_W2], stddev=0.02), name="d_W2") self.d_b2 = tf.Variable(tf.random_normal([dim_W2], stddev=0.02), name="d_b2")
この時,名前の添え字を見るだけでG用かD用か見分けられるようにしてありました.こうすることで,D用とG用それぞれの最適化メソッドにバインドする変数リストを簡単に与えられます.
# tensorflow変数の準備 discrim_vars = [x for x in tf.trainable_variables() if "d_" in x.name] gen_vars = [x for x in tf.trainable_variables() if "g_" in x.name] # 最適化メソッドの用意 optimizer_d = tf.train.AdamOptimizer(0.0002, beta1=0.5).minimize(d_cost_tf, var_list=discrim_vars) optimizer_g = tf.train.AdamOptimizer(0.0002, beta1=0.5).minimize(g_cost_tf, var_list=gen_vars)
GとDの2つのモデルは同時に(交互に)学習する必要があります.どちらから学習を始めても構いませんが,私は偶数番目をG,奇数番目をDの学習に充てました.バッチサイズ毎に最適化させるモデルを切り替えつつ,データセットからバッチを取り終わったら(1 epoch回ったら)またデータセットをシャッフルしてループを回す,というような方法になっています.
# 学習開始 itr = 0 # epoch毎のfor for epoch in range(n_epochs): index = np.arange(len(train_imgs)) np.random.shuffle(index) trX = train_imgs[index] # batch_size毎のfor for start, end in zip( range(0, len(trX), batch_size), range(batch_size, len(trX), batch_size)): # 画像は0-1に正規化 Xs = trX[start:end].reshape([-1, 28,28,1]) / 255. Zs = np.random.uniform(-1,1, size=[batch_size, dcgan_model.dim_z]).astype(np.float32) if np.mod(itr, 2) != 0 : # 偶数番目はGeneratorを学習 _, gen_loss_val = sess.run([optimizer_g, g_cost_tf], feed_dict={Z_tf:Zs}) discrim_loss_val, p_real_val, p_gen_val \ = sess.run([d_cost_tf, p_real, p_gen], feed_dict={Z_tf:Zs, image_tf:Xs}) #print("=========== updating G ==========") #print("iteration:", itr) #print("gen loss:", gen_loss_val) #print("discrim loss:", discrim_loss_val) else: # 奇数番目はDiscriminatorを学習 _, discrim_loss_val = sess.run([optimizer_d, d_cost_tf], feed_dict={Z_tf:Zs, image_tf:Xs}) gen_loss_val, p_real_val, p_gen_val = sess.run([g_cost_tf, p_real, p_gen], feed_dict={Z_tf:Zs, image_tf:Xs}) #print("=========== updating D ==========") #print("iteration:", itr) #print("gen loss:", gen_loss_val) #print("discrim loss:", discrim_loss_val) #print("Average P(real)=", p_real_val.mean()) #print("Average P(gen)=", p_gen_val.mean()) itr += 1
以上がTensorFlowで実装するGANのあらましです.
遭遇したエラー
ValueError: No gradients provided for any variable, check your graph for ops that do not support gradients, between variables
これは微分演算ができないことを示しています.理由は書き方のミスで,計算グラフがどこかで途絶えているからです.目を凝らして順々に計算グラフを追っていき,余計な変数や誤った変数に接続していないか,結合係数の次元数が適切かを確かめてみましょう.
The value of a feed cannot be a tf.Tensor object. Acceptable feed values include Python scalars, strings, lists, numpy ndarrays, or TensorHandles.
バッチをfeedさせるときにtf.Tensorオブジェクトに変換できなかったことを示します..eval()メソッドを使うとうまくいくらしいです.
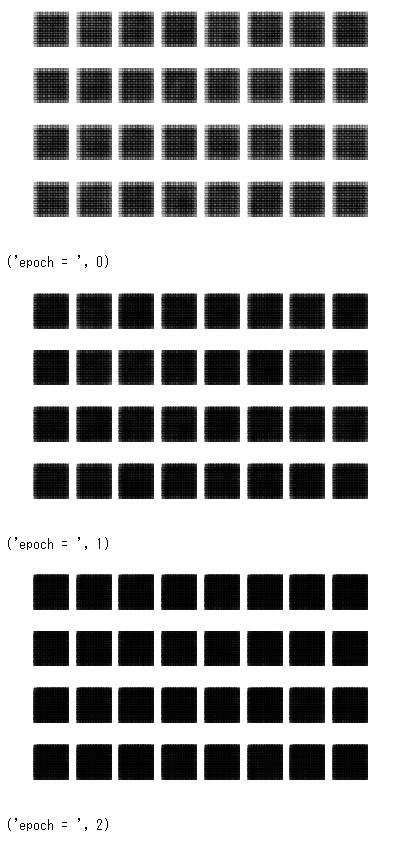
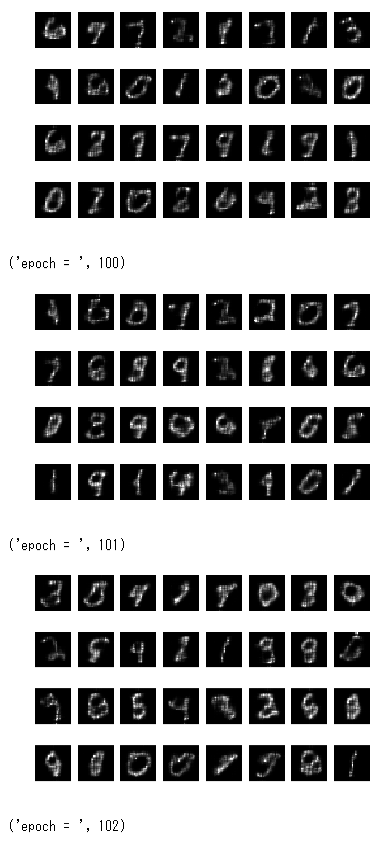
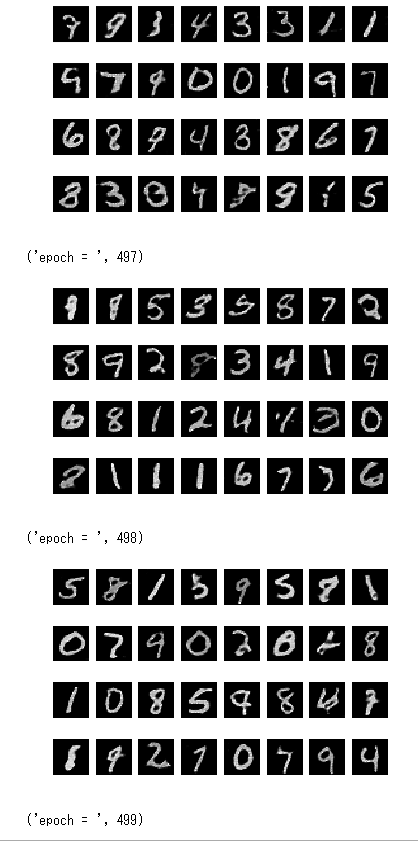
学習例
最初20epochくらいまではほぼ真っ暗だったので本当に学習できているか心配になりましたが,250epoch以上からかなりはっきりと数字が生成されました.CPUで計算するととんでもなく時間がかかるので,GPUが利用可能なTensorFlowを推奨します.私の環境の場合,8時間くらいかかって100epochだったのが,10分程度で500epochまで学習できるようになりました.
全ソースコード
Jupyter環境のブロックに分けています
# tensorflowのロード import tensorflow as tf import numpy as np
# MNISTデータのダウンロード from tensorflow.examples.tutorials.mnist import input_data mnist = input_data.read_data_sets("MNIST_data", one_hot=True)
# 補助関数の定義 # 1次元ベクトル化 def tensor_to_vector(input): shape = input.get_shape()[1:].as_list() dim = np.prod(shape) return tf.reshape(input, [-1, dim]), dim # leaky ReLU活性化関数 def leaky_relu(input): return tf.maximum(0.2*input, input)
# DCGANクラスの定義 class DCGAN(): def __init__( self, batch_size=100, image_shape=[28,28,1], dim_z=100, dim_W1=1024, dim_W2=128, dim_W3=64, dim_ch=1, ): # クラス内変数の初期化 self.batch_size = batch_size self.image_shape = image_shape self.dim_z = dim_z self.dim_W1 = dim_W1 self.dim_W2 = dim_W2 self.dim_W3 = dim_W3 self.dim_ch = dim_ch # TensorFlow内学習係数の定義 ## Generator self.g_W1 = tf.Variable(tf.random_normal([dim_z, dim_W1], stddev=0.02), name="g_W1") self.g_b1 = tf.Variable(tf.random_normal([dim_W1], stddev=0.02), name="g_b1") self.g_W2 = tf.Variable(tf.random_normal([dim_W1, dim_W2*7*7], stddev=0.02), name="g_W2") self.g_b2 = tf.Variable(tf.random_normal([dim_W2*7*7], stddev=0.02), name="g_b2") self.g_W3 = tf.Variable(tf.random_normal([5, 5, dim_W3, dim_W2], stddev=0.02), name="g_W3") self.g_b3 = tf.Variable(tf.random_normal([dim_W3], stddev=0.02), name="g_b3") self.g_W4 = tf.Variable(tf.random_normal([5, 5, dim_ch, dim_W3], stddev=0.02), name="g_W4") self.g_b4 = tf.Variable(tf.random_normal([dim_ch], stddev=0.02), name="g_b4") ## Discriminator self.d_W1 = tf.Variable(tf.random_normal([5,5,dim_ch,dim_W3], stddev=0.02), name="d_W1") self.d_b1 = tf.Variable(tf.random_normal([dim_W3], stddev=0.02), name="d_b1") self.d_W2 = tf.Variable(tf.random_normal([5,5,dim_W3,dim_W2], stddev=0.02), name="d_W2") self.d_b2 = tf.Variable(tf.random_normal([dim_W2], stddev=0.02), name="d_b2") self.d_W3 = tf.Variable(tf.random_normal([dim_W2*7*7,dim_W1], stddev=0.02), name="d_W3") self.d_b3 = tf.Variable(tf.random_normal([dim_W1], stddev=0.02), name="d_b3") self.d_W4 = tf.Variable(tf.random_normal([dim_W1, 1], stddev=0.02), name="d_W4") self.d_b4 = tf.Variable(tf.random_normal([1], stddev=0.02), name="d_b4") def build_model(self): # プレースホルダーの用意 Z = tf.placeholder(tf.float32, [self.batch_size, self.dim_z]) # Generatorへの入力 # 画像の用意 img_real = tf.placeholder(tf.float32, [self.batch_size]+self.image_shape) # Discriminatorへの入力 img_gen = self.generate(Z) # 出力 raw_real = self.discriminate(img_real) raw_gen = self.discriminate(img_gen) # 確率 p_real = tf.nn.sigmoid(raw_real) p_gen = tf.nn.sigmoid(raw_gen) # コスト関数の定義 discrim_cost = tf.reduce_mean( -tf.reduce_sum(tf.log(p_real) + \ tf.log(tf.ones(self.batch_size, tf.float32) - p_gen), axis=1)) gen_cost = tf.reduce_mean(-tf.reduce_sum(tf.log(p_gen), axis=1)) return Z, img_real, discrim_cost, gen_cost, p_real, p_gen def generate(self, Z): # 1層目 fc1 = tf.matmul(Z, self.g_W1) + self.g_b1 bm1, bv1 = tf.nn.moments(fc1, axes=[0]) bn1 = tf.nn.batch_normalization(fc1, bm1, bv1, None, None, 1e-5) relu1 = tf.nn.relu(bn1) # 2層目 fc2 = tf.matmul(relu1, self.g_W2) + self.g_b2 bm2, bv2 = tf.nn.moments(fc2, axes=[0]) bn2 = tf.nn.batch_normalization(fc2, bm2, bv2, None, None, 1e-5) relu2 = tf.nn.relu(bn2) # [batch, dim_W2*7*7] -> [batch, 7, 7, dim_W2] y2 = tf.reshape(relu2, [self.batch_size, 7,7,self.dim_W2]) # 3層目 conv_t1 = tf.nn.conv2d_transpose(y2, self.g_W3, strides=[1,2,2,1], output_shape=[self.batch_size, 14,14,self.dim_W3]) + self.g_b3 bm3,bv3 = tf.nn.moments(conv_t1, axes=[0, 1, 2]) bn3 = tf.nn.batch_normalization(conv_t1, bm3, bv3, None, None, 1e-5) relu3 = tf.nn.relu(bn3) # 4層目 conv_t2 = tf.nn.conv2d_transpose(relu3, self.g_W4, strides=[1,2,2,1], output_shape=[self.batch_size, 28, 28, self.dim_ch]) + self.g_b4 img = tf.nn.sigmoid(conv_t2) return img def discriminate(self, img): # 1層目 conv1 = tf.nn.conv2d(img, self.d_W1, strides=[1,2,2,1], padding="SAME") + self.d_b1 y1 = leaky_relu(conv1) # 2層目 conv2 = tf.nn.conv2d(y1, self.d_W2, strides=[1,2,2,1], padding="SAME") + self.d_b2 y2 = leaky_relu(conv2) # 3層目 vec, _ = tensor_to_vector(y2) fc1 = tf.matmul(vec, self.d_W3) + self.d_b3 y3 = leaky_relu(fc1) # 4層目 fc2 = tf.matmul(y3, self.d_W4) + self.d_b4 #y4 = tf.nn.sigmoid(fc2) return fc2 def generate_samples(self, batch_size): # ここでは指定したbatch_sizeでサンプルを生成するため,self.batch_sizeは使わない Z = tf.placeholder(tf.float32, [batch_size, self.dim_z]) # 1層目 fc1 = tf.matmul(Z, self.g_W1) + self.g_b1 bm1, bv1 = tf.nn.moments(fc1, axes=[0]) bn1 = tf.nn.batch_normalization(fc1, bm1, bv1, None, None, 1e-5) relu1 = tf.nn.relu(bn1) # 2層目 fc2 = tf.matmul(relu1, self.g_W2) + self.g_b2 bm2, bv2 = tf.nn.moments(fc2, axes=[0]) bn2 = tf.nn.batch_normalization(fc2, bm2, bv2, None, None, 1e-5) relu2 = tf.nn.relu(bn2) # [batch, dim_W2*7*7] -> [batch, 7, 7, dim_W2] y2 = tf.reshape(relu2, [batch_size, 7,7,self.dim_W2]) # 3層目 conv_t1 = tf.nn.conv2d_transpose(y2, self.g_W3, strides=[1,2,2,1], output_shape=[batch_size, 14,14,self.dim_W3]) + self.g_b3 bm3,bv3 = tf.nn.moments(conv_t1, axes=[0, 1, 2]) bn3 = tf.nn.batch_normalization(conv_t1, bm3, bv3, None, None, 1e-5) relu3 = tf.nn.relu(bn3) # 4層目 conv_t2 = tf.nn.conv2d_transpose(relu3, self.g_W4, strides=[1,2,2,1], output_shape=[batch_size, 28, 28, self.dim_ch]) + self.g_b4 img = tf.nn.sigmoid(conv_t2) return Z, img
# モデルの構築 dcgan_model = DCGAN(batch_size=128, image_shape=[28,28,1]) Z_tf, image_tf, d_cost_tf, g_cost_tf, p_real, p_gen = dcgan_model.build_model() Z_gen, image_gen = dcgan_model.generate_samples(batch_size=32)
# セッション開始 sess = tf.InteractiveSession() saver = tf.train.Saver(max_to_keep=10)
# tensorflow変数の準備 discrim_vars = [x for x in tf.trainable_variables() if "d_" in x.name] gen_vars = [x for x in tf.trainable_variables() if "g_" in x.name] # 最適化メソッドの用意 optimizer_d = tf.train.AdamOptimizer(0.0002, beta1=0.5).minimize(d_cost_tf, var_list=discrim_vars) optimizer_g = tf.train.AdamOptimizer(0.0002, beta1=0.5).minimize(g_cost_tf, var_list=gen_vars)
# TensorFlow内のグローバル変数の初期化
tf.global_variables_initializer().run()
from matplotlib import pyplot as plt # 生成画像の可視化 def visualize(images, num_itr, rows, cols): # タイトル表示 plt.title(num_itr, color="red") for index, data in enumerate(images): # 画像データはrows * colsの行列上に配置 plt.subplot(rows, cols, index + 1) # 軸表示は無効 plt.axis("off") # データをグレースケール画像として表示 plt.imshow(data.reshape(28,28), cmap="gray", interpolation="nearest") plt.show()
# 学習 def train(train_imgs, n_epochs, batch_size): itr = 0 for epoch in range(n_epochs): index = np.arange(len(train_imgs)) np.random.shuffle(index) trX = train_imgs[index] # batch_size毎のfor for start, end in zip( range(0, len(trX), batch_size), range(batch_size, len(trX), batch_size)): # 画像は0-1に正規化 Xs = trX[start:end].reshape([-1, 28,28,1]) / 255. Zs = np.random.uniform(-1,1, size=[batch_size, dcgan_model.dim_z]).astype(np.float32) if np.mod(itr, 2) != 0 : # 偶数番目はGeneratorを学習 _, gen_loss_val = sess.run([optimizer_g, g_cost_tf], feed_dict={Z_tf:Zs}) discrim_loss_val, p_real_val, p_gen_val \ = sess.run([d_cost_tf, p_real, p_gen], feed_dict={Z_tf:Zs, image_tf:Xs}) #print("=========== updating G ==========") #print("iteration:", itr) #print("gen loss:", gen_loss_val) #print("discrim loss:", discrim_loss_val) else: # 奇数番目はDiscriminatorを学習 _, discrim_loss_val = sess.run([optimizer_d, d_cost_tf], feed_dict={Z_tf:Zs, image_tf:Xs}) gen_loss_val, p_real_val, p_gen_val = sess.run([g_cost_tf, p_real, p_gen], feed_dict={Z_tf:Zs, image_tf:Xs}) #print("=========== updating D ==========") #print("iteration:", itr) #print("gen loss:", gen_loss_val) #print("discrim loss:", discrim_loss_val) #print("Average P(real)=", p_real_val.mean()) #print("Average P(gen)=", p_gen_val.mean()) itr += 1 # サンプルを表示 z = np.random.uniform(-1,1, size=[32, dcgan_model.dim_z]).astype(np.float32) generated_samples = sess.run([image_gen], feed_dict={Z_gen:z}) #plt.imshow(generated_samples[0][0].reshape(28,28), cmap="gray", interpolation="nearest") visualize(generated_samples[0], epoch, 4,8) print("epoch = ", epoch)
train(mnist.test.images, 500, 128)
RealSenseをOpenCVで使う
今回紹介するクラスによって,RealSenseでVR or ARを実現するために必要なRealSenseの機能を簡単に使えるようになります.具体的には,
- RGBカメラ・デプスカメラ画像の取得
- デプスマップをRGBカメラから見た画像(とその逆)の取得
- デプスカメラを原点とする座標系(=RealSenseのワールド座標系)でのXYZ頂点座標の取得
- カメラ内部・外部パラメータ(デプスカメラから見たRGBカメラの位置姿勢)を取得
- 自動露出,自動ホワイトバランスの有効化・無効化
が可能となります.RGBカメラとデプスカメラは空間的に位置がずれているので,ARに使うためには外部パラメータが不可欠です.また,色に関する処理をする場合は自動露出がかえって邪魔になることがあるので,こちらも切れるようにしました.データはすべてOpenCVのcv::Matもしくはstd::vector<cv::Point3d>で取得できます.なお,カメラ内部パラメータはOpenCVで使える形式にしています.
サンプル
こんな感じに使います.
#include "RealSenseCVWrapper.h" int main(void) { RealSenseCVWrapper rscv(640, 480); rscv.getCalibrationStatus(); std::cout << "calibration data: " << "\n camera matrix = \n" << rscv.cameraMatrix << "\n camera distortion params = \n" << rscv.distCoeffs << "\n transform matrix of RGB cam = \n" << rscv.transform << std::endl; while (1) { cv::Mat src; // RealSenseのストリームを開始 rscv.queryFrames(); //rscv.getColorBuffer(src); // デプス画像にマップしたカラー画像を取得 rscv.getMappedColorBuffer(src); // 頂点座標の勾配を推定して陰影表示 rscv.getXYZBuffer(); cv::Mat XYZImage(rscv.bufferSize, CV_32FC1); for (int i = 1; i < rscv.bufferSize.height-1; i++) { for (int j = 1; j < rscv.bufferSize.width-1; j++) { // 隣4隅への勾配ベクトルを算出 float intensity = 0.0f; cv::Point3f v0, v1, v2, v3, v4; v0 = rscv.xyzBuffer[i*rscv.bufferSize.width + j]; if (v0.z != 0) { v1 = rscv.xyzBuffer[(i - 1)*rscv.bufferSize.width + (j - 1)] - v0; v2 = rscv.xyzBuffer[(i - 1)*rscv.bufferSize.width + (j + 1)] - v0; v3 = rscv.xyzBuffer[(i + 1)*rscv.bufferSize.width + (j + 1)] - v0; v4 = rscv.xyzBuffer[(i + 1)*rscv.bufferSize.width + (j - 1)] - v0; // それぞれの勾配から法線ベクトルを4種類算出して平均 // v1 v2 // v0 // v4 v3 // 法線方向は手前側が正 cv::Point3f n0, n1, n2, n3, n4; n1 = v2.cross(v1); n2 = v3.cross(v2); n3 = v4.cross(v3); n4 = v1.cross(v4); n0 = (n1 + n2 + n3 + n4) / cv::norm(n1 + n2 + n3 + n4); cv::Point3f light(3.f, 3.f, 0.f); intensity = n0.ddot(light/cv::norm(light)); } else { intensity = 0.f; } XYZImage.at<float>(i, j) = intensity; } } // RealSenseのストリームを終了 rscv.releaseFrames(); cv::imshow("ts", src); cv::imshow("xyz", XYZImage); int c = cv::waitKey(10); if (c == 27) break; if (c == 'a') { rscv.useAutoAdjust(false); rscv.setExposure(-8); rscv.setWhiteBalance(6000); } if (c == 'A') { rscv.useAutoAdjust(true); } } return 0; }
RealSenseCVWrapperクラスを初期化するには引数を指定する必要があります.あんまりC++の知識がないのでよくない実装な気もしますが,とりあえず動いているのでよしとしましょう.また,RealSenseCVWrapper::getXxxxBuffer()を利用する前と後をqueryFrames()とreleaseFrames()で挟む必要があります.デストラクタで終了処理をしているので,終了時については特に気にする必要はないと思います.
結果は次の画像のようになります.デプスカメラから見たカラー画像も,コマンド一つで取得可能です.また,XYZ座標値を可視化するために,法線を算出して簡単な拡散反射モデルで表示しています.

ソースコード
今回のクラスのソースコードです.自己責任でご利用ください.
RealSenseCVWrapper.h
#pragma once #include <opencv2\opencv.hpp> #include <RealSense\SenseManager.h> #include <RealSense\SampleReader.h> #pragma comment(lib, "libpxc.lib") class RealSenseCVWrapper { public: // constructor // @param // width : width of picture size // height: height of picture size RealSenseCVWrapper(); RealSenseCVWrapper(int width, int height); ~RealSenseCVWrapper(); void safeRelease(); // query RealSense frames // you should execute queryStream() function before get buffers // and releaseFrames(); function after all by every frame // @return // true = frame is succcessfully queried bool queryFrames(); void releaseFrames(); // get camera buffers void getColorBuffer(); void getDepthBuffer(); void getMappedDepthBuffer(); void getMappedColorBuffer(); void getXYZBuffer(); void getColorBuffer(cv::Mat &color); void getDepthBuffer(cv::Mat &depth); void getMappedDepthBuffer(cv::Mat &mappedDepth); void getMappedColorBuffer(cv::Mat &mappedColor); void getXYZBuffer(std::vector<cv::Point3f> xyz); // adjust camera settings // @param // use_aa: flag to use auto exposure and auto white balance void useAutoAdjust(bool use_aa); // set RGB camera exposure // @param // value: exposure time = 2 ^ value [s] // if you want 30fps you should set under 33 ~ 2 ^ -5 [ms] void setExposure(int32_t value); // set RGB camera white balance // @param // value: white point = value [K] // (ex: D65 standard light source = about 6500[K]) void setWhiteBalance(int32_t value); // get calibration status // - camera matrix // - distortion parameters // - transform matrix (RGB camera origin to depth camera origin) void getCalibrationStatus(); // OpenCV image buffer cv::Size bufferSize; // buffer size cv::Mat colorBuffer; // RGB camera buffer (BGR, 8UC3) cv::Mat depthBuffer; // depth camera buffer (Gray, 32FC1) cv::Mat colorBufferMapped; // RGB camera buffer mapped to depth camera (BGR, 8UC3) cv::Mat depthBufferMapped; // depth camera buffer mapped to RGB camera (Gray, 32FC1) std::vector<cv::Point3f> xyzBuffer; // XYZ point cloud buffer from depth camera (XYZ) // RGB camera calibration data writtern by OpenCV camera model cv::Mat cameraMatrix; // inclueds fx,fy,cx,cy cv::Mat distCoeffs; // k1,k2,p1,p2,k3 cv::Mat transform; // 4x4 coordinate transformation from RGB camera origin to the world (=depth) system origin protected: Intel::RealSense::SenseManager *rsm; Intel::RealSense::Sample *sample; };
RealSenseCVWrapper.cpp
(修正1/23)getColorBuffer()の問題を修正
#include "RealSenseCVWrapper.h" using namespace Intel::RealSense; using namespace cv; using namespace std; RealSenseCVWrapper::RealSenseCVWrapper() { } RealSenseCVWrapper::RealSenseCVWrapper(int w = 640, int h = 480) { rsm = SenseManager::CreateInstance(); if (!rsm) { cout << "Unable to create SenseManager" << endl; } // RealSense settings rsm->EnableStream(Capture::STREAM_TYPE_COLOR, w, h); rsm->EnableStream(Capture::STREAM_TYPE_DEPTH, w, h); if (rsm->Init() < Status::STATUS_NO_ERROR) { cout << "Unable to initialize SenseManager" << endl; } bufferSize = Size(w, h); } RealSenseCVWrapper::~RealSenseCVWrapper() { safeRelease(); } void RealSenseCVWrapper::safeRelease() { if (rsm) { //rsm->Release(); rsm->Close(); } } bool RealSenseCVWrapper::queryFrames() { if (rsm->AcquireFrame(true) < Status::STATUS_NO_ERROR) { return false; } sample = rsm->QuerySample(); } void RealSenseCVWrapper::releaseFrames() { rsm->ReleaseFrame(); } void RealSenseCVWrapper::getColorBuffer() { // Acquire access to image data Image *img_c = sample->color; Image::ImageData data_c; img_c->AcquireAccess(Image::ACCESS_READ_WRITE, Image::PIXEL_FORMAT_BGR, &data_c); // create OpenCV Mat from Image::ImageInfo Image::ImageInfo cinfo = img_c->QueryInfo(); colorBuffer = Mat(cinfo.height, cinfo.width, CV_8UC3); // copy data colorBuffer.data = data_c.planes[0]; colorBuffer = colorBuffer.clone(); // release access img_c->ReleaseAccess(&data_c); //img_c->Release(); } void RealSenseCVWrapper::getDepthBuffer() { Image *img_d = sample->depth; Image::ImageData data_d; img_d->AcquireAccess(Image::ACCESS_READ_WRITE, Image::PIXEL_FORMAT_DEPTH_F32, &data_d); Image::ImageInfo dinfo = img_d->QueryInfo(); depthBuffer = Mat(dinfo.height, dinfo.width, CV_32FC1); depthBuffer.data = data_d.planes[0]; depthBuffer = depthBuffer.clone(); img_d->ReleaseAccess(&data_d); //img_d->Release(); } void RealSenseCVWrapper::getMappedDepthBuffer() { // create projection stream to acquire mapped depth image Projection *projection = rsm->QueryCaptureManager()->QueryDevice()->CreateProjection(); Image *depth_mapped = projection->CreateDepthImageMappedToColor(sample->depth, sample->color); // acquire access to depth data Image::ImageData ddata_mapped; depth_mapped->AcquireAccess(Image::ACCESS_READ, Image::PIXEL_FORMAT_DEPTH_F32, &ddata_mapped); // copy to cv::Mat Image::ImageInfo dinfo = depth_mapped->QueryInfo(); depthBufferMapped = Mat(dinfo.height, dinfo.width, CV_32FC1); depthBufferMapped.data = ddata_mapped.planes[0]; depthBufferMapped = depthBufferMapped.clone(); // release access depth_mapped->ReleaseAccess(&ddata_mapped); depth_mapped->Release(); projection->Release(); } void RealSenseCVWrapper::getMappedColorBuffer() { // create projection stream to acquire mapped depth image Projection *projection = rsm->QueryCaptureManager()->QueryDevice()->CreateProjection(); Image *color_mapped = projection->CreateColorImageMappedToDepth(sample->depth, sample->color); // acquire access to depth data Image::ImageData cdata_mapped; color_mapped->AcquireAccess(Image::ACCESS_READ, Image::PIXEL_FORMAT_BGR, &cdata_mapped); // copy to cv::Mat Image::ImageInfo cinfo = color_mapped->QueryInfo(); colorBufferMapped = Mat(cinfo.height, cinfo.width, CV_8UC3); colorBufferMapped.data = cdata_mapped.planes[0]; colorBufferMapped = colorBufferMapped.clone(); // release access color_mapped->ReleaseAccess(&cdata_mapped); color_mapped->Release(); projection->Release(); } void RealSenseCVWrapper::getXYZBuffer() { Projection *projection = rsm->QueryCaptureManager()->QueryDevice()->CreateProjection(); std::vector<Point3DF32> vertices; vertices.resize(bufferSize.width * bufferSize.height); projection->QueryVertices(sample->depth, &vertices[0]); xyzBuffer.clear(); for (int i = 0; i < bufferSize.width*bufferSize.height; i++) { Point3f p; p.x = vertices[i].x; p.y = vertices[i].y; p.z = vertices[i].z; xyzBuffer.push_back(p); } projection->Release(); } void RealSenseCVWrapper::getColorBuffer(cv::Mat & color) { getColorBuffer(); color = colorBuffer.clone(); } void RealSenseCVWrapper::getDepthBuffer(cv::Mat & depth) { getDepthBuffer(); depth = depthBuffer.clone(); } void RealSenseCVWrapper::getMappedDepthBuffer(cv::Mat & mappedDepth) { getMappedDepthBuffer(); mappedDepth = depthBufferMapped.clone(); } void RealSenseCVWrapper::getMappedColorBuffer(cv::Mat & mappedColor) { getMappedColorBuffer(); mappedColor = colorBufferMapped.clone(); } void RealSenseCVWrapper::getXYZBuffer(std::vector<cv::Point3f> xyz) { getXYZBuffer(); xyz = xyzBuffer; } void RealSenseCVWrapper::useAutoAdjust(bool use_aa) { Device *device = rsm->QueryCaptureManager()->QueryDevice(); // get current values if you use manual mode device->SetColorAutoExposure(use_aa); device->SetColorAutoWhiteBalance(use_aa); } void RealSenseCVWrapper::setExposure(int32_t value) { rsm->QueryCaptureManager()->QueryDevice()->SetColorExposure(value); } void RealSenseCVWrapper::setWhiteBalance(int32_t value) { rsm->QueryCaptureManager()->QueryDevice()->SetColorWhiteBalance(value); } void RealSenseCVWrapper::getCalibrationStatus() { // aquire calibration data of RGB camera stream Projection * projection = rsm->QueryCaptureManager()->QueryDevice()->CreateProjection(); Calibration::StreamCalibration calib; Calibration::StreamTransform trans; projection->QueryCalibration() ->QueryStreamProjectionParameters(StreamType::STREAM_TYPE_COLOR, &calib, &trans); // copy RGB camera calibration data to OpenCV cameraMatrix = Mat::eye(3, 3, CV_32FC1); cameraMatrix.at<float>(0, 0) = calib.focalLength.x; cameraMatrix.at<float>(1, 1) = calib.focalLength.y; cameraMatrix.at<float>(0, 2) = calib.principalPoint.x; cameraMatrix.at<float>(1, 2) = calib.principalPoint.y; distCoeffs = Mat::zeros(5, 1, CV_32FC1); distCoeffs.at<float>(0) = calib.radialDistortion[0]; distCoeffs.at<float>(1) = calib.radialDistortion[1]; distCoeffs.at<float>(2) = calib.tangentialDistortion[0]; distCoeffs.at<float>(3) = calib.tangentialDistortion[1]; distCoeffs.at<float>(4) = calib.radialDistortion[2]; transform = Mat::eye(4, 4, CV_32FC1); for (int i = 0; i < 3; i++) { for (int j = 0; j < 3; j++) { transform.at<float>(i, j) = trans.rotation[i][j]; // todo: rotationの行と列の順を確認 } transform.at<float>(i, 3) = trans.translation[i]; } projection->Release(); }
cv::Matにおけるclone()とcopyTo()の挙動の違い
※本記事はOpenCV Advent Calender 2016向けに書きました。 http://qiita.com/advent-calendar/2016/opencv
OpenCVをちょっと知ってる人はこのタイトルで「何言ってんだこいつ」ってなったかも知れませんが,一見同じに見える(※後述)この2種類のdeep-copyメソッドは,実はある特定のコードで挙動が異なります.
その特定のコードとはROI処理です.StackOverflowでも「ROIへのコピーはcopyTo()を使えばできるよ!」と書いてありましたが,なぜ(自分が)普段から使うclone()を使わないのかについて言及する人がいなかったので,今回の検証に繋がりました.
ROIに画像を貼り付けられない!?
例えば画像処理で顔検出して,そこにアニメアイコンを貼り付けるような自動クソコラ生成器を作ろうとする場合,ROIを設定してそこに既存の画像を貼り付ける,なんてことをすると思います.しかし,それを素直にcv::Mat::clone()メソッドで実装しようとするとなぜか貼り付けられない場合があります.
以下のコードは,次のような画像を作成しようとしているコードです.

// ROI Rect roi(100, 100, 100, 100); Mat img_roi = frame_c(roi); // 元画像のROIを生成 // clone Mat img_roi_clone = Mat(100, 100, CV_8UC3, Scalar(0, 255, 0)); // 貼り付ける画像を生成 img_roi = img_roi_clone.clone(); // 貼り付ける画像をcloneしてからROIに貼り付け imshow("Color ROI clone", frame_c); // なぜか貼り付けできてない
しかし,実際にこれで出てくる画像は・・・

このように,なぜか貼り付けできません.通常,ROIへの任意の画像処理は元画像frame_cに即座に反映されるため,このようにimg_roiに画像データをコピーすればROIの部分だけ塗りつぶされるはずなのですが,そうはならないようです.
そこでcv::Mat::clone()ではなくcv::Mat::copyTo()を使うと,目的の画像のようになります.
// ROI Rect roi(100, 100, 100, 100); Mat img_roi = frame_c(roi); // 元画像のROIを生成 // copyto Mat img_roi_copy = Mat(100, 100, CV_8UC3, Scalar(0,255,0)); img_roi_copy.copyTo(img_roi); // 貼り付ける画像をROIにコピー imshow("Color ROI copy", frame_c); // こうすると貼り付けできる

つまり,copyTo()でならROIに画像をコピーできるけど,clone()では画像をROIにコピーできないという仕様になっていることが確認できます.
※ちなみに,浅いコピー(shallow copy)img_roi = img_roi_shallow;は当然ながらうまくいきません.
やったね!今度からcopyTo()を使えばすべてうまくいくんだね!
更なる罠
…って簡単にはいかないのが困りものです.実は,一度「うまくいかないコピー」でROIをコピーしようとしてしまうと,その後いくらcopyTo()で正しく書こうが一切反映されなくなります.
// ROI
Rect roi(100, 100, 100, 100);
Mat img_roi = frame_c(roi);
// clone
Mat img_roi_clone = Mat(100, 100, CV_8UC3, Scalar(0, 0, 255));
img_roi = img_roi_clone.clone();
imshow("Color ROI clone", frame_c); // これが反映されないのは知ってる
// copyto after clone
Mat img_roi_copy_clone = Mat(100, 100, CV_8UC3, Scalar(255, 0, 0));
img_roi_copy_clone.copyTo(img_roi);
imshow("Color ROI copy after clone", frame_c); // ナンデ!コピーできないナンデ!?
このソースコードによれば,clone()を使う方では赤い矩形が,copyTo()を使う方では先ほど描いた赤の矩形が青で塗りつぶされるため青い矩形がそれぞれ描かれるはずです.ただし我々は既にclone()が上手くいかないことを知っているので,clone()の時点ではframe_cに何も描かれず,copyTo()の方で青い矩形が初めて描かれるだろうと期待します.しかし,実際には

このように,どちらの画像にも全く矩形が描かれなくなります.勿論,clone()ではなく=を先に書いたとしてもうまく描かれなくなります.
clone()の仕様
clone()もcopyTo()も,行列cv::Matの「深いコピー(deep copy)」に分類されます.じゃあclone()とcopyTo()の何が違うんじゃい!って思ったプログラマの皆さんなら,OpenCVのソースコードを覗き込みたくなると思います.実際,cv::Mat::clone()がどんな実装なのか見てみましょう.
inline Mat Mat::clone() const { Mat m; copyTo(m); return m; }
......
...
同じやんけ!!!
どうやら内部的にcopyTo()を呼び出しているようです(リファレンスにもそう書いてありましたが,挙動が違うことを発見したので信じられなくなって確認しました).しかしよく考えてみてください.clone()ではわざわざ自分自身をcopyTo()した画像を作って返しています.そういう意味で本当に自身のクローンを生成しているわけです.
原因の考察
ROIは通常の画像と同等に扱えるように見えるけれども,実際には元画像とデータを共有しているため,やはり普通のcv::Matとはちょっと違います.これらのことから,clone()では画像のクローンですべての情報が上書きされてしまい,元画像との参照関係が崩れてしまうのだろうと推察できます.浅いコピーの方でうまくいかない理由は,浅いコピーが実際にはデータポインタを上書きする(=元の参照関係を外す)処理であるため,これもまた元画像への参照が失われてしまうことが原因と思われます.そう考えると,一旦関係が崩れてしまったROIにいくら正しい方法で上書きしても,元画像には影響しないことが容易に察せられます.
結論
今回は,ROI処理においてclone(),copyTo()およびoperator=(cv::Mat)の挙動に違いがあることを確かめました.結論としては,ROIが元画像とデータ共有している関係上,copyTo()以外を使うとその参照関係が崩れてしまい,それ以降の変更が反映されなくなるのが原因と推察できました.皆さんもROIを扱う時にはcopyTo()を使っていきましょう.
cv::Mat画像のサブピクセル画素値を取得
久々にOpenCVのTips
画像処理をしていると,テクセルサンプリングのように浮動小数点座標の画素値を取り出したい場合が時々出てきます.そういう時って普通,整数座標の画素値を使ってバイリニア補間するんですけど,なぜか OpenCVでは「特定の1点のサブピクセル画素を取得する」という処理を標準で用意していません(ちなみにcv::Mat::at<>()メソッドの座標値に浮動小数点数を入れてもコンパイルエラーは起きませんが,実際には暗黙的にintに変換された座標値からサンプルされます).サブピクセル精度でコーナー座標を検出するcv::findCornerSubPix()みたいに画像からサブピクセル座標を割り出す処理はあるんですが,今回やりたいのはその逆なんです.
ただし,サブピクセル精度で画像を切り出す処理ならあり,cv::getRectSubPix()でできます.今回のTipsのアイディアは,これで得たいサブピクセル座標を画像中心として3x3画像で切り取り中央座標値をサンプルする,というものです.意外と気づかない手法だと思うので,書き残すことにしました.
// グレースケール画像mの要素をサブピクセル座標pから取得する // 通常のMat::at()メソッドでは四捨五入された座標から取得されてしまうのでcv::getRectSubPix()を利用する // 画像範囲外は境界線と同じとする // サポートする型はCV_32F or CV_8U double sampleSubPix(cv::Mat m, cv::Point2d p) { cv::Mat r; cv::getRectSubPix(m, cv::Size(3, 3), p, r); return (double)r.at<float>(1, 1); }
上のコードはグレースケール画像のみ対応ですが,同じ方法でカラー画像もできます.ただし,実はcv::getRectSubPix()はCV_8UもしくはCV_32Fにしか対応していない関数なので,要素がdoubleのCV_64F画像はサポートしていません.その場合は仕方ないので一旦castしましょう.
透視投影変換にガンマをかけて嘘パースを実現
はじめに
今回の手法で次のような絵が撮れます.


本記事ではフリーのMMD描画アプリを利用して嘘パースの実験をしていますが,シェーダーレベルでアプリを改造する上,原理のみ紹介するので,CGデザイナよりもむしろエフェクトを開発するプログラマ向けの記事となります.予め御了承下さいませ.
嘘パースについて
皆さん,嘘パース(オーバーパース,漫画パース)というのはご存知でしょうか?
例えば,サンライズアニメでよく見かける,例の武器を画面いっぱいに突き出して構える迫力ある構図(サンライズパース)をCGアニメで再現したいとします.しかし,実寸で作られたCGに同じポーズをさせて普通に透視投影変換でレンダリングすると,あんなに大きく武器が映りませんのでちょっと迫力に欠けてしまいます.なぜそんなことが起こるかというと,サンライズパースでは正確な透視投影よりも手前の物体がより大きく映るようにあえて強調した投影に従って描いているからです.このように,通常の透視投影変換ではありえないくらい近い物体が大きく写っているような投影を嘘パースと呼びます.アニメや漫画では迫力があった構図なのにCGにすると物足りない,という現象の原因は嘘パースだったりします.
現在,CGアニメで嘘パースを実現する方法は,その構図専用の歪んだCGモデルを用意する というのが一般的です.でも,それってかなり面倒くさいですよね.だって同じキャラクターなのに超カッコいい構図の度に新しいCGモデルを用意しなきゃいけないんですから.他には,自動で人物CGモデルを局所的に肥大化させる手法(嘘パースプラグイン),画角の異なるカメラを複数用意してシームレスに映像を合成して実現する手法(マンガパース)などが知られています.
ここでは,より原理的な部分に着目して嘘パースを実現する手法を考案しました.それが,透視投影変換にガンマをかける という発想です.ディスプレイガンマのようにZ軸方向にガンマをかけることで,人間の知覚に近い歪み方をとっても簡単に再現できるのではないか?と思って試してみました.これは新しい投影変換を開発する必要がありますので,ちょっと考え方を示していきます.
原理
通常の透視投影
デザイン系の人には遠近法と言った方がわかりやすいかもしれないですが,透視投影とはすべての光線がある唯一の視点(原点)に集中するものとして考案された投影法です.

透視投影をCGで実現するには,レンダリング時に透視投影行列という同次変換行列(下式)をかませます.これによって,透視投影の視錐体がクリッピング空間に圧縮されるわけです.
透視投影にガンマをかける
透視投影では,物体の見た目の大きさは視点からの距離に反比例するという性質があります.3DCGプログラマにとっては非常に当たり前のことに思えますが,それはなぜでしょう?理由は,透視投影では光線が原点に直線的に集まると仮定しているからです.もちろん,この仮定は物理的には間違ってません.

対して嘘パースでは,視点の物体が通常の透視投影よりも極端に大きくなるという性質があります.透視投影では直線 に従って投影面
での見た目の大きさを決定していましたが,私はここでガンマ変換をかけることにしました.つまり,人が奥行きのあるシーンを観察したときに,スティーブンスの冪乘則に従って奥行知覚が実際の奥行きよりも強調される と仮定しました(これが事実かどうかは私は知りません).この時の投影は次のようになります.

このようにすると,同じ大きさの物体でも遠くにあれば投影面ではより小さく映り,逆に近い物体はより大きく映ることになります.具体的には,同じ物体の見た目の大きさはの逆数に比例します.
ガンマ透視投影変換
この考えに基づいて投影行列を再構成すると,次のようになります.ここではガンマ透視投影変換と呼ぶことにします.とすると元の透視投影行列と一致するはずです.プログラム的には,モデルビュー行列をかけた後に一旦Z軸を編集する必要があるのでちょっと面倒ですが,バーテックスシェーダーで難なく実装できるでしょう.
実験
今回はMMD on WebGLのソースコードを改変して,初音ミクの標準モデル(あにまさ式)で試してみました.この場を借りて作者様に感謝します.
結果
まずは通常の透視投影変換でレンダリングした結果がこちらです.

これとほぼ同じ構図,ポーズで でガンマ透視投影変換でレンダリングした結果が次のようになります.

狙い通り,前方に突き出した手がかなり強調される嘘パースが実現できました.
今回の目的とは異なりますが,逆に とガンマを1より小さくした場合どうなるかというと...

こうなります.奥の方の手が透視投影よりも大きく映ります.偶然かもしれませんが,平行投影に似ています.
注意点
上の結果はかなりうまくいってるようですが,実はガンマ透視投影では構図をうまく調節しないとすぐにひどい結果になります.

このように,画面の外側は激しく歪みやすいです.しかし改善策はあります.ガンマ透視投影行列の光軸中心(行列の3列目の上2個)をずらしてやることで,ある程度問題を回避できるようです.

上2つはほぼ同じ方向からほぼ同じポーズをレンダリングしたもので,上は光軸中心を中央に固定しており,下では光軸中心を顔付近に持ってきています.このように,光軸を中央からずらして調節することで,ほぼ違和感のない嘘パースが様々な構図で実現できるようです.
経験則ですが,初音ミクのような人体モデルの場合はガンマによって頭部が歪むと強く違和感を覚えるので,頭部だけは歪まないように構図を調節すると良いでしょう.